目标检测资源汇总
目标检测模型的评估指标 mAP(Mean Average Precision) 详解(附代码)
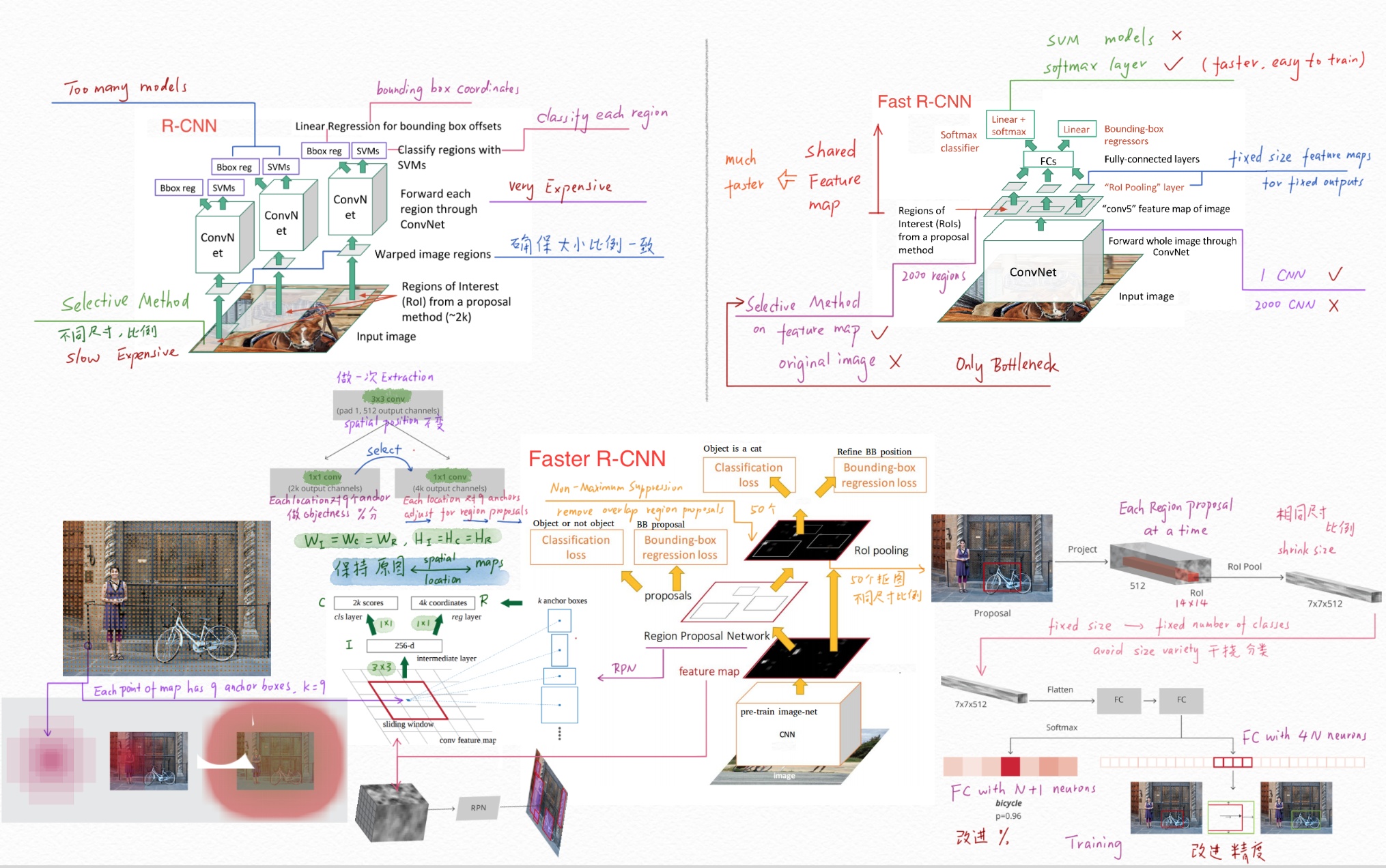
- 结合候选框建议(Region Proposal, RP)的框架:R-CNN、Fast R-CNN、Faster R-CNN
- 超实时的基于回归框架:YOLO、SSD
更多图片笔记见:图片笔记
1 主要文献
1.1 滑窗法
滑窗法(Sliding Window)的思路及其简单,首先需要已经训练好的一个分类器,然后把图片按照一定间隔和不同的大小分成一个个窗口,在这些窗口上执行分类器。如果得到较高的分数分类,就认为是检测到了物体。把每个窗口都用分类器执行一遍之后,再对得到的分数做一些后处理,如非极大值抑制(Non-Maximum Suppression,NMS)等,最后得到物体类别和对应区域。
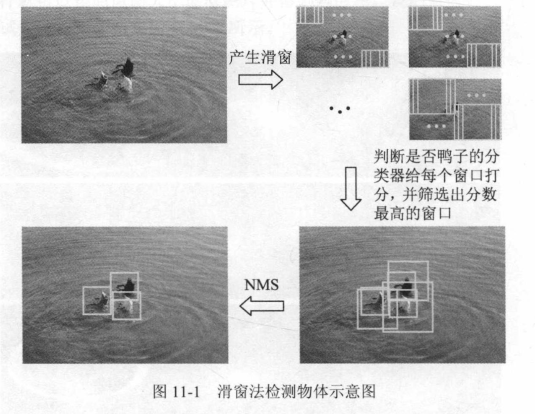
滑窗法非常简单,但是效率低下,尤其是还要考虑物体的长宽比。如果执行比较耗时的分类器算法,用滑窗法就不太现实。常见的都是一些小型分类网络和滑窗法结合的应用,如论文《Mitosis Detection in Breast Cancer Histology Images with Deep Neural Networks1》所做的检测胸切片图像中有丝分裂用于辅助癌症诊断。
1.2 非极大值抑制
1.3 选择性搜索
选择性搜索(Selective Search)是主要运用图像分割技术来进行物体检测。
1.3.1 简介
Selective Search 属于传统机器学习的方法,在 Faster R-CNN 中被 RPN 所取代。
在较高层次上进行选择性搜索通过不同大小的窗口查看图像,并且对于每个尺寸,尝试通过纹理、颜色或强度将相邻像素组合在一起以标识对象。类似一个聚类的过程。在窗口的 size 更大的时候,相邻聚类尝试合并。最后把不同窗口大小下的不同聚类区块都提交作为 proposal。
- Selective Search for Object Recognition3
- 论文笔记《Selective Search for object recognition》
- [初窥目标检测]——《目标检测学习笔记(2):浅析Selective Search论文——“Selective Search for object recognition”》
- Selective Search for Object Recognition解读
- 输入:彩色图片(三通道)
- 输出:物体位置的可能结果 $L$
- 使用《Efficient Graph-Based Image Segmentation》方法,获取初始分割区域 $R={r_1,r_2, \ldots, r_n}$
- 初始化相似度集合 $S=∅$
- 计算 $R$ 中两两相邻区域 $r_i, r_j$ 之间的相似度,将其添加到相似度集合 $S$ 中。
- 从相似度集合 $S$ 中找出,相似度最大的两个区域 $r_i$ 和 $r_j$,将其合并成为一个区域 $r_t$。然后从相似度集合中除去原先与 $r_i$ 和 $r_j$ 相邻区域之间计算的相似度。计算新的 $r_t$ 与其相邻区域(原先与 $r_i$ 或 $r_j$ 相邻的区域)的相似度,将其结果添加的到相似度集合 $S$ 中。同时将新区域 $r_t$ 添加到区域集合 $R$ 中。迭代直至 $S$ 为空,即可合并区域的都已合并完。区域的合并方式类似于哈夫曼树的构造过程,因此称之有层次(hierarchical)。
- 获取 $R$ 中每个区域的 Bounding Boxes,这个结果就是图像中物体可能位置的可能结果集合 $L$。
1.3.2 解读
- 选择性搜索 Selective Search – 算法详解+源码分析
- 目标检测–Selective Search for Object Recognition(IJCV, 2013)
- 项目地址:http://disi.unitn.it/~uijlings/MyHomepage/index.php#page=projects1
- GitHub:https://github.com/CodeXZone/selectivesearch
1.4 R-CNN
- 论文:Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation4
- 项目地址: https://github.com/rbgirshick/rcnn (基于MATLAB)
- R-CNN论文详解
- R-CNN论文翻译
- R-CNN文章详细解读
R-CNN 方法结合了两个关键的因素:
- 将大型卷积神经网络(CNNs)应用于自下而上的候选区域以定位和分割物体。
- 当带标签的训练数据不足时,先针对辅助任务进行有监督预训练,再进行特定任务的调优,就可以产生明显的性能提升。
1.5 SPP
- 论文:Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition5
- SPPNet论文翻译-空间金字塔池化
- 原始图片中的ROI如何映射到到feature map?
- 何凯明在ICCV2015上演讲的PPT
- 卷积神经网络物体检测之感受野大小计算
- RCNN学习笔记(3)
- SPP-net文章详细解读
1.6 Fast R-CNN
为了通过判别训练来获得好的结果,往往需要使用大量训练样本。在目标检测中,训练问题是非常不平衡的,因为相比于特定目标来说有更大量的未知的背景。这就需要我们通过搜索背景数据来找到一个相对少量的潜在的误报(虚警)的负样本集,或者叫做难例(负样本难例,Hard Negative Example)
1.6.1 相关资料
HOG(Histogram of Oriented Gradient, 最为经典的论文7、较为详细的论文8)是2005年CVPR会议上,法国国家计算机科学及自动控制研究所的Dalal等人提出的一种解决人体目标检测的图像描述子,该方法使用梯度方向直方图(Histogram of Oriented Gradients,简称HOG)特征来表达人体,提取人体的外形信息和运动信息,形成丰富的特征集。
- 论文DPM(Deformable Part Model)9
- 论文翻译 使用判别训练的部件模型进行目标检测
- DPM目标检测算法(毕业论文节选)
- HOG特征(Histogram of Gradient)学习总结
- HOG特征(毕业论文节选)
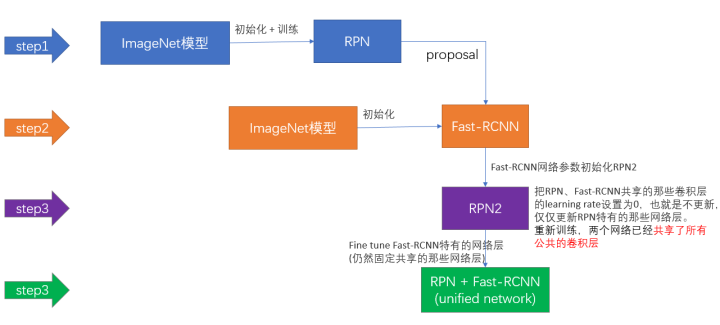
1.7 Faster R-CNN
其实 RPN 最终就是在原图尺度上,设置了密密麻麻的候选 Anchor。然后用cnn去判断哪些Anchor是里面有目标的 foreground anchor,哪些是没目标的 backgroud。所以,仅仅是个二分类而已!
四步交替训练:
- 论文:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks10
- Faster R-CNN论文翻译
- 视频:锚框解读
- Faster-RCNN论文细节原理解读+代码实现gluoncv(MXNet)
- Faster R-CNN论文及源码解读(推荐)
- 图解Faster R-CNN简单流程(推荐)
- Faster R-CNN
- 目标检测 - Faster R-CNN 详解(推荐)
- R-CNN系列论文解读
- 一文读懂 Faster RCNN(推荐)
- 从编程实现角度学习Faster R-CNN(附极简实现)(推荐)
- Faster R-CNN: Down the rabbit hole of modern object detection
- 一文教你如何用PyTorch构建 Faster RCNN
- 边框回归(Bounding Box Regression)详解
1.8 Mask R-CNN
1.9 YOLO
- 论文1:You Only Look Once: Unified, Real-Time Object Detection13
- 论文2:YOLO9000: Better, Faster, Stronger14
- 论文3:YOLOv3: An Incremental Improvement15
- YOLO论文翻译——中英文对照
- YOLO详解
-
[目标检测 YOLO原理与实现](https://zhuanlan.zhihu.com/p/32525231)
1.10 SSD
- 论文:SSD: Single Shot MultiBox Detector16
- Single Shot MultiBox Detector论文翻译——中文版
-
[目标检测 SSD原理与实现](https://zhuanlan.zhihu.com/p/33544892?tdsourcetag=s_pcqq_aiomsg) - a-PyTorch-Tutorial-to-Object-Detection
- 卷积神经网络的感受野
- 解读SSD目标检测方法
- faster rcnn中rpn的anchor,sliding windows,proposals?
- Object Detections中Anchors的那些事
- a-PyTorch-Tutorial-to-Object-Detection
1.11 A Survey
- Deep Learning for Generic Object Detection: A Survey17
- 深度学习目标检测模型全面综述:Faster R-CNN、R-FCN和SSD
- Object Detection with Deep Learning: The Definitive Guide
- ECCV2018目标检测(object detection)算法总览
- 目标检测(Object Detection)的整理
- CVPR2019目标检测方法进展综述
2 学习资源
- Grid R-CNN解读:商汤最新目标检测算法
- Grid R-CNN 论文
- 计算机视觉研究入门全指南
- 经典CNN结构简析:AlexNet、VGG、NIN、GoogLeNet、ResNet etc.
- 从RCNN到SSD,这应该是最全的一份目标检测算法盘点
- R-CNN、Fast/Faster/Mask R-CNN、FCN、RFCN 、SSD原理简析
-
Ciresan D C, Giusti A, Gambardella L M, et al. Mitosis Detection in Breast Cancer Histology Images with Deep Neural Networks[C]. medical image computing and computer assisted intervention, 2013: 411-418. ↩
-
Neubeck A, Van Gool L. Efficient Non-Maximum Suppression[C]. international conference on pattern recognition, 2006: 850-855. ↩
-
Uijlings J R, De Sande K E, Gevers T, et al. Selective Search for Object Recognition[J]. International Journal of Computer Vision, 2013, 104(2): 154-171. ↩
-
Girshick R B, Donahue J, Darrell T, et al. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation[J]. computer vision and pattern recognition, 2014: 580-587. ↩
-
He K, Zhang X, Ren S, et al. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. ↩
-
Girshick R B. Fast R-CNN[J]. international conference on computer vision, 2015: 1440-1448. ↩
-
Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]. computer vision and pattern recognition, 2005: 886-893. ↩
-
Dalal N. Finding people in images and videos[D]. Institut National Polytechnique de Grenoble-INPG, 2006. ↩
-
] P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained part based models. TPAMI, 2010 ↩
-
Ren S, He K, Girshick R B, et al. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. ↩
-
Kokot M, Deorowicz S, Dlugosz M, et al. Even Faster Sorting of (Not Only) Integers[J]. arXiv: Data Structures and Algorithms, 2017: 481-491. ↩
-
He K, Gkioxari G, Dollar P, et al. Mask R-CNN[J]. international conference on computer vision, 2017: 2980-2988. ↩
-
Redmon J, Divvala S K, Girshick R B, et al. You Only Look Once: Unified, Real-Time Object Detection[J]. computer vision and pattern recognition, 2016: 779-788. ↩
-
Redmon J, Farhadi A. YOLO9000: Better, Faster, Stronger[J]. computer vision and pattern recognition, 2017: 6517-6525. ↩
-
Redmon J, Farhadi A. YOLOv3: An Incremental Improvement.[J]. arXiv: Computer Vision and Pattern Recognition, 2018. ↩
-
Liu W, Anguelov D, Erhan D, et al. SSD: Single Shot MultiBox Detector[J]. european conference on computer vision, 2016: 21-37 ↩
-
Liu L, Ouyang W, Wang X, et al. Deep Learning for Generic Object Detection: A Survey.[J]. arXiv: Computer Vision and Pattern Recognition, 2018. ↩